

□
「ロボット知能化演習」
ロボットコンテスト2024開催
機械系技術者にとって実際に機械を設計・製作することは非常に意味のあることであり、その修得方法は重大な課題の一つといえます。 (ありていに言えば、機械製図、力学、材料力学、電気電子回路などなど、個々の教科は勉強することができても「モノづくり」における一連の過程として勉強することは非常に難しく、またそういった教科がないということです。) そこで、本講義ではロボットコンテストを実施し、ある目的を持ったロボットの設計・製作を通じて、それらの向上及び、修得を目的としています。
ロボットのレギュレーションは以下の通り。
ロボット本体の寸法は、幅250mm以内、奥行き250mm以内、高さ2m以内
本体重量は6.0kg以内
製作総費用内
動力源は指定の充電池1個
操縦はBluetoothによる無線操作
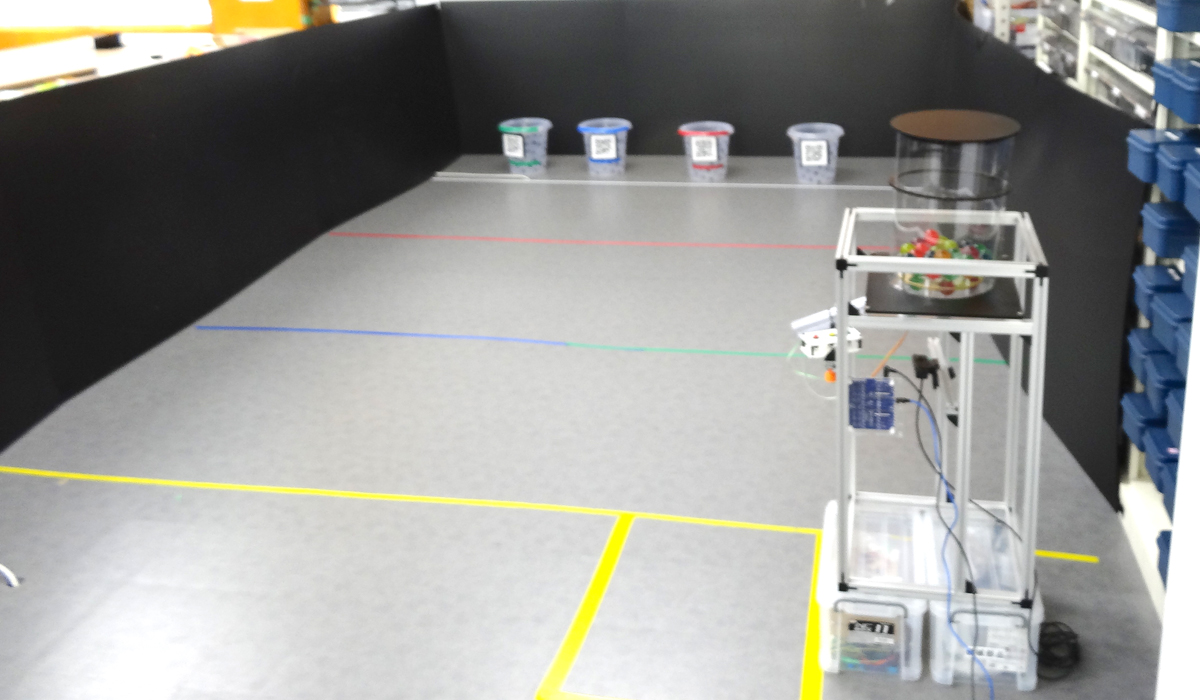
競技種目は「玉入れ」です。
当初のルール
ボールステーション(フィールド右手前)から落下してくるボール(直径3cmのスーパーボール、赤・青・緑・黄・橙・紫の6色)を画像認識して、色の識別をする(色データが正しければ1点、間違っていれば0点)
玉入れロボットに色データを送信
玉入れロボットはボールステーションからボールを受け取る。
画像処理からの色データに基づいて玉入れロボットが色別のバケツ(赤・青・緑・他の4種類)にボールを入れる。エリア毎に点数が異なる(エリアはフィールドの線で区切られている)。バケツに近いエリアから1点、2点、3点
受信した色データと異なるバケツに入れた場合は0.2点。バケツに入らなかったら0点。
自動で3分間、手動で2分間の計5分間
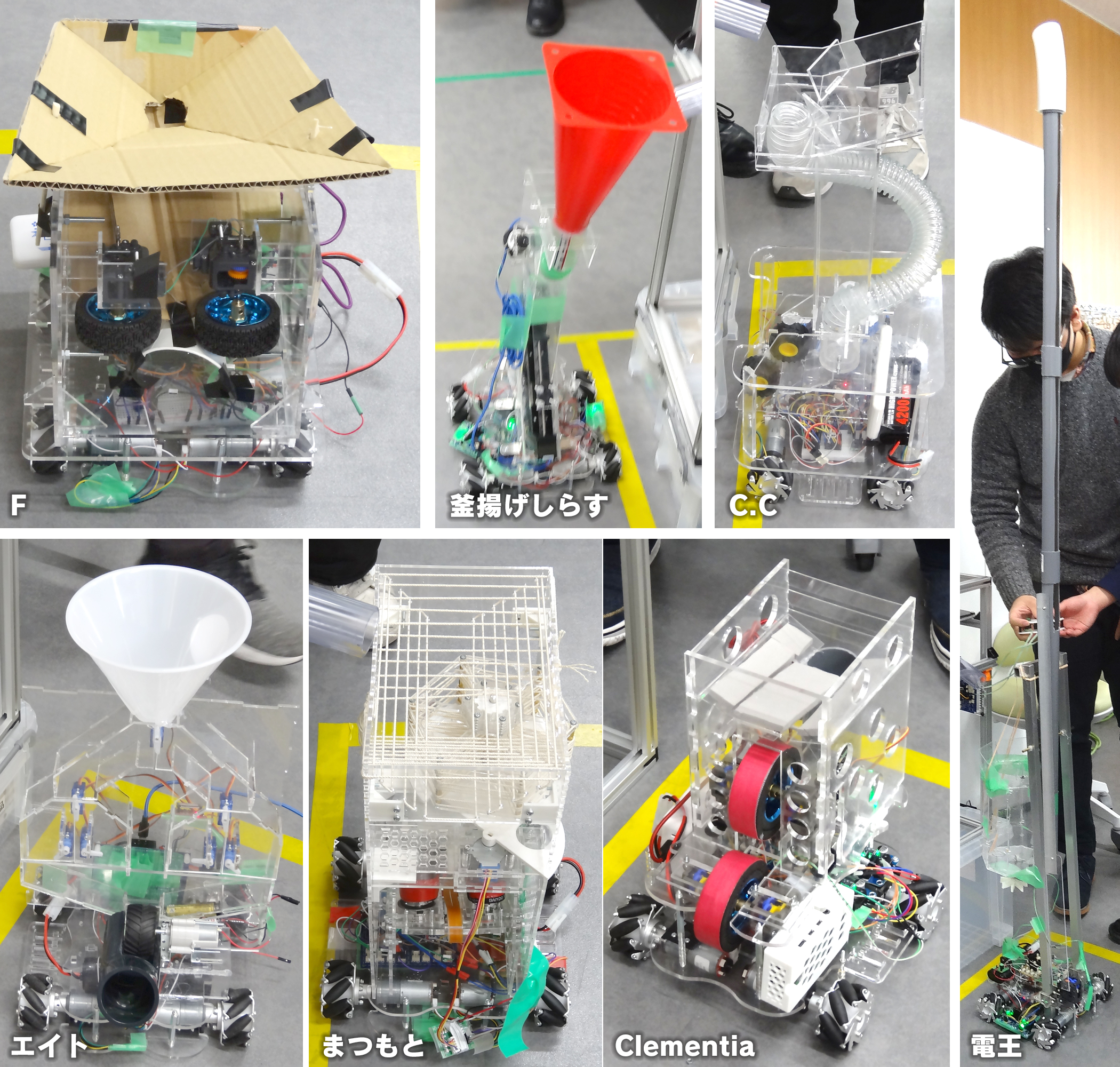
ロボットコンテストは2025年2月14日にA7号館2階ものづくり実習室で開催され、7チーム7台のロボットが参加して行われました。

当日のルール
自動操作は中止。手動で5分間
画像処理は中止。玉を捕球できれば0.5点
どのエリアからでも玉がバケツに入れば2点。バケツに入った場合、ボールステーションで受け取った個数*0.1点
球を発射することができれば0.7点。バケツに入らなければ0点。
ボールステーションからボールを受け取り(受け取れれば0.5点)、ボールを発射できれば0.7点、バケツに入れば2点(バケツに入った場合受け取ったボールの個数*0.1点)です。手動操作で5分間の競技時間です。
| 班名 | 1回目 画像得点 | 1回目 玉入れ得点 | 1回目 残り時間 | 2回目 画像得点 | 2回目 玉入れ得点 | 2回目 残り時間 | 順位 |
| F | 0.5 | 0 | 60.0 | 0.5 | 0.7 | 44.0 | 4 |
| まつもと | 0.5 | 0 | 0.0 | 0 | 0 | 52.2 | 7 |
| 釜揚げしらす | 0.6 | 2.0 | 0.0 | 0 | 0 | 0.0 | 2 |
| エイト | 0.7 | 2.0 | 0.0 | 0.6 | 2.0 | 0.0 | 1 |
| 電王 | 0.5 | 0 | 25.0 | 0 | 0 | 0.0 | 6 |
| Clementia | 0.5 | 0 | 127.0 | 0 | 0 | 0.0 | 5 |
| C.C | 0.5 | 0.7 | 100.0 | 0.5 | 0.7 | 180.0 | 3 |

岡山理科大学情報理工学部
情報理工学科