
人を支援するロボットシステムの構築とその知能化手法の知識を学ぶ。
人を支援するロボットシステムの構築とその知能化手法の知識を学ぶ。
ロボットシステムの基礎的な知識と構築方法を学び、スマートで高度な情報社会に対応したエンジニア養成を目指します。
AIが組込まれたロボット技術の基本的な設計と開発方法を学びます。
人を支援するロボットシステムの基礎的な知識と構築方法を学びます。
本コースで学べること 01
ロボットシステムの基礎的な知識と構築方法を学び、スマートで高度な情報社会に対応したエンジニア養成を目指します。

ピックアップ科目
ロボット運動学
ロボット工学は非常に広い分野を含む学問であり、将来ロボット工学を積極的に活用することが重要になってきます。この講義では、簡易な構造のロボットを具体例として、位置や姿勢に関する運動を理解するための運動学(Kinematics)の基礎について学びます。
ピックアップ科目
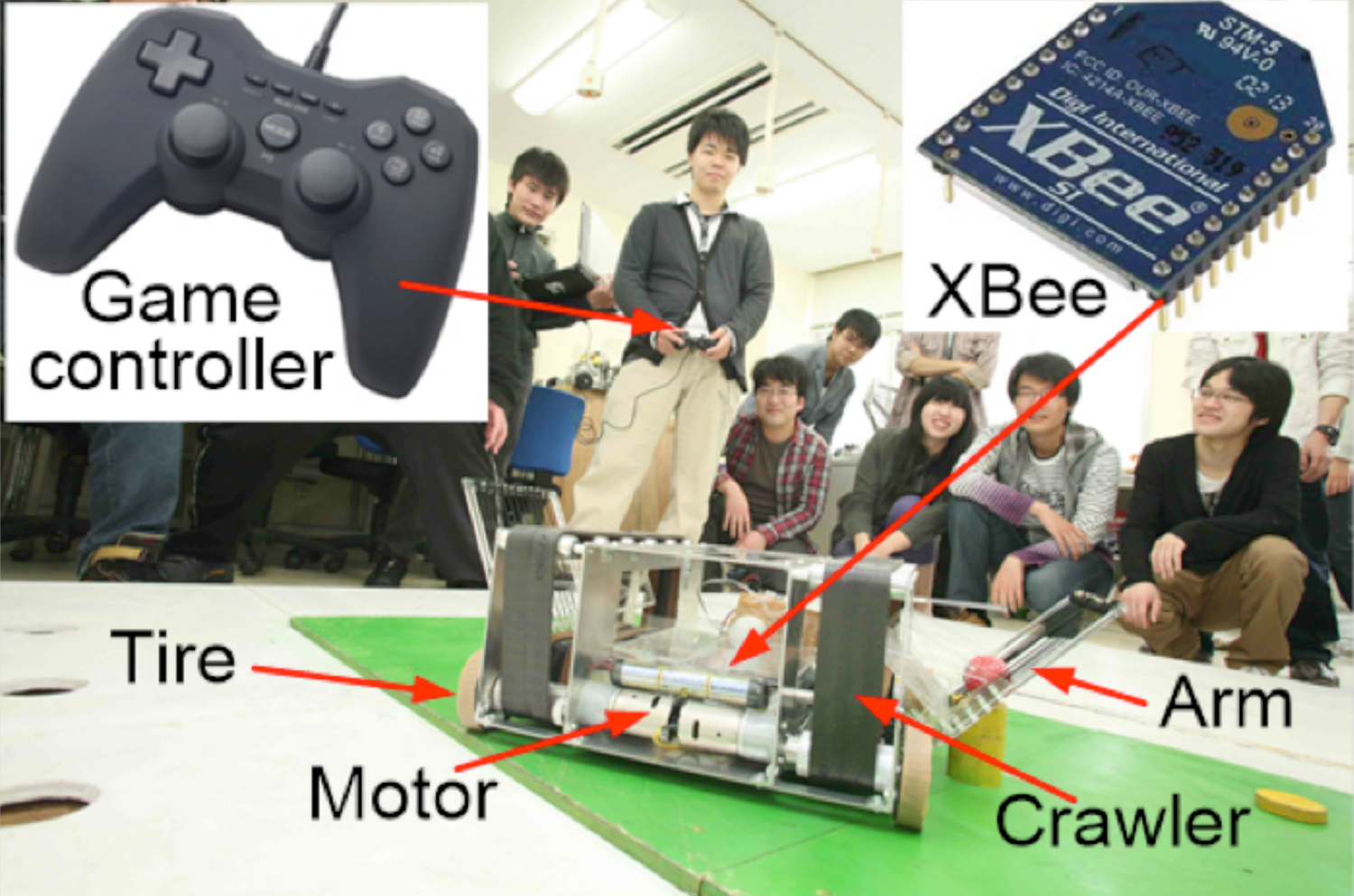
ロボット創造工学Ⅰ、Ⅱ(3年 春・秋学期)
5~6名のチームで、ロボットの寸法や費用などの条件を満たしながら、設計から制作・制御までゼロから無線通信で動くロボットを創ります。ロボットコンテストでは、玉入れ(俊敏さ)と綱引き(パワー)を行い、毎年白熱した戦いが繰り広げられます。実践的なものづくり教育の集大成です。
本コースで学べること 02
AIが組込まれたロボット技術の基本的な設計と開発方法を学びます。
ピックアップ科目
知的制御システム論
スマートで高度な情報社会の実現には、あらゆる家電や工業製品から得られるビッグデータに対して知能的な情報処理(AI)を行う必要があります。この講義では、人間の脳で行われている情報処理を実現するための方式(人工知能、ディープラーニングなど)について学びます。

ピックアップ科目
ロボット制御プログラミング
ロボットシステムを知的に制御するためには、画像処理やセンサの信号処理、シミュレーション、制御系設計など高度な情報処理が必要となります。この講義では、C言語を題材として、ロボット制御のためのプログラミングの基礎を学びます。
本コースで学べること 03
人に支援するロボットシステムの基礎的な知識と構築方法を学びます。
ピックアップ科目
ロボットダイナミクス
ロボット工学は、主に産業・工業用機械システムと対象として、その自動化や省力化、安全性の向上などに役立っています。この講義では、産業用ロボットの制御や解析を行うために必要となる力学の基礎を学習します。また、得られたモデルの利用方法についても学びます。
ピックアップ科目
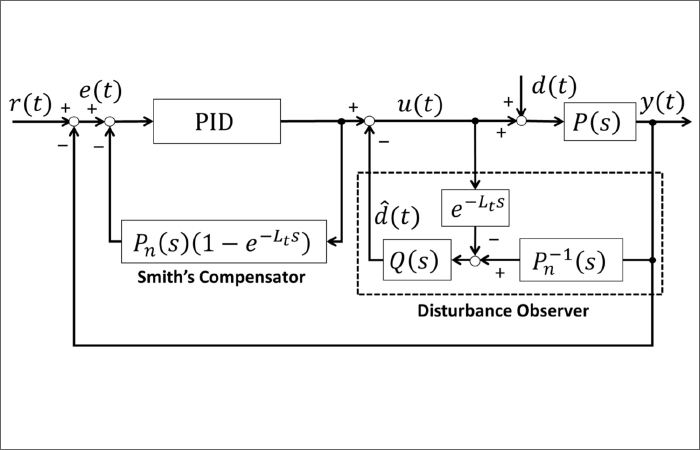
ロボット制御工学
ロボットの挙動もニュートン力学で厳格に支配されていますが、現実世界では摩擦や外乱など、予測困難な要因もあります。この講義では、いくつかの具体的なロボットを通して、それらを克服しロボットをうまく制御するための基礎的な制御工学を学びます。
□
卒業研究
探索型レスキューロボットの試作
荷物搬送用6脚歩行ロボットの試作
はしご自動昇降ロボットの開発
飛行機着陸制御の強化学習
□
卒業後の進路
機械・精密機械などの製造業 | IT・ソフトウェア関連企業(情報通信業)
公務員 | 研究職 | 大学院など
□
5つのコース
岡山理科大学情報理工学部
情報理工学科