
フルードパワーシステム研究室
赤木 徹也(教授)
Tetsuya Akagi(Professor)
研究テーマ
低価格柔軟空気圧アクチュエータの開発と在宅リハビリテーション機器への応用
低価格ウェアラブル流体制御弁の開発と応用
柔軟空気圧アクチュエータを用いた各種柔軟ロボットの開発
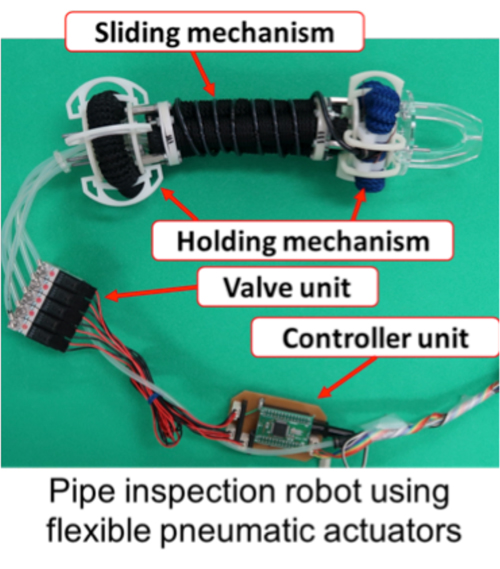
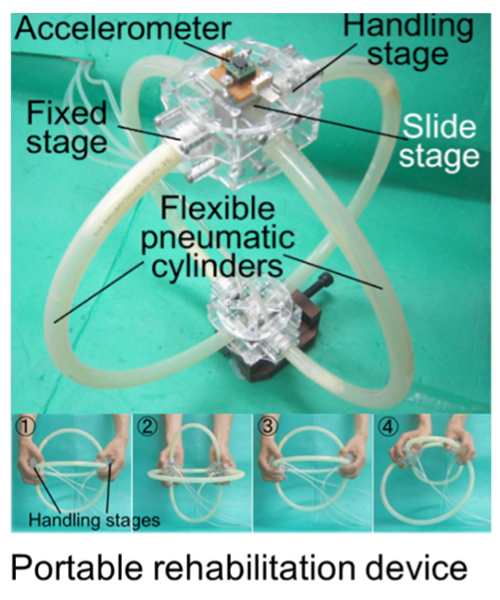
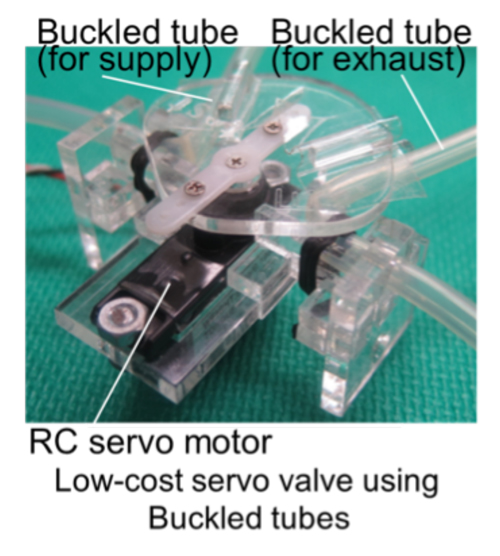
圧縮性による柔軟性を有し、軽量で力/質量比の高く、更に安価な空気圧ソフトアクチュエータの特徴を活かして、使い捨て可能なホームリハビリテーション機器の開発やその制御機器やロボットへの応用を行う。具体的には、曲がっても使える柔軟な空気圧シリンダを開発し、ポータブルリハビリテーション機器へ応用した。また、材料費が千円以下の安価な弁としてチューブの屈曲を利用したサーボ弁を開発した。また、変位センサ内蔵型ゴム人工筋の開発、伸長型柔軟アクチュエータを用いた配管検査ロボットの開発などの研究を行っている。さらに、人材のグローバル化をめざし、所属院生の全員が国際会議で講演発表を行っている。
専門分野
メカトロニクス、空気圧制御機器、機械制御工学
キーワード
ソフトアクチュエータ、ウェアラブル制御機器、組込みコントローラ
希望する連携内容
組込み技術を用いた空気圧駆動ウェアラブル制御機器の開発と応用
小型・軽量・低価格な空気圧制御弁の開発
柔軟アクチュエータや柔軟センサの開発と応用
概要
Outline
空気圧人工筋肉を用いたはしご自動昇降ロボット
Automatic Ladder Lifting Robot Using Pneumatic Artificial Muscles
空気圧人工筋肉を用いた六脚移動ロボット
(Six-legged Mobile Robot Using Pneumatic Artificial Muscles)
伸長型柔軟空気圧アクチュエータを用いた配管検査ロボット
Pipe Inspection Robot Using Extension type Flexible Pneumatic Actuators
ポータブルリハビリテーション機器
Portable Rehabilitation Device
屈曲チューブを用いた低コストサーボ弁
Low-cost Servo Valve Using Buckled Tubes
Research theme
Development of Low-cost Flexible Pneumatic Actuator and Its Application for Home-based Rehabilitation Devices
Development of Low-cost Wearable Fluid Control Valve and Its Application
Development of Various Flexible Robots Using Flexible Pneumatic Actuators
By taking advantage of pneumatic actuators that have features of higher force / mass ratio, lightweight and flexibility based on compressibility, we have developed low-cost wearable actuators and low-cost home-based rehabilitation devices that can be disposable after using it. Specifically, we developed a flexible pneumatic cylinder that can be used even if the cylinder bends. A spherical actuator that consists of two flexible pneumatic cylinders have been also developed as an application for portable rehabilitation device. We have also developed a low-cost wearable servo valve using buckled tubes, an artificial muscle with built-in displacement sensor and a pipe inspection robot using extension type flexible pneumatic actuators. In addition, aiming at globalization for students, all graduate students in our laboratory have presentation in international conferences.
Research Field
Mechatronics, Pneumatic control device, Mechanical control
Keyword(s)
Soft actuator, Wearable control system, Embedded controller
Desired cooperation
Development of wearable pneumatic controlled devices using embedded controllers and its application
Implementation of low-cost, small-sized and light-weight pneumatic control valves
Development and application for flexible actuator and flexible sensors

岡山理科大学情報理工学部
情報理工学科